

Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314
|
|
|
Главная | E-mail | 27.07.2024 |
|
|
||
| Главная страница | О журнале | Авторам | Редколлегия | Контакты | ||
|
|
||
|
Научно-технический интернет-журнал Свидетельство о регистрации Эл № ФС 77-31314 |
||
|
Измерительные телевизионные системы
Дата публикации : 16.10.2009 | Просмотров : 3331 |
Концепция построения солнечного датчика на матричном ФПЗС без объектива
Государственная корпорация "Российская корпорация нанотехнологий", Москва В системах астрономической ориентации и навигации космических аппаратов широко используются оптико-электронные приборы, в основе которых лежат системы технического зрения с применением матричных фотоприемников и устройств цифровой обработки видеосигнала. Одним из таких приборов является солнечный датчик, представляющий собой оптико-электронное устройство определения координат солнечного диска. В данной статье предлагается концепция построения солнечного датчика, имеющего диафрагму в виде матрицы прямоугольных (квадратных) или круглых отверстий, соизмеримых с размером элемента фотоприемной матрицы. Будут рассмотрены варианты датчиков без объектива и их базовая конструкция, включающая диафрагму, выполненную в различных вариантах, и матрицу ПЗС. Различие вариантов состоит в различии конструкции диафрагмы. Базовая конструкция представляет собой блок, в котором жестко соединены матрица, диафрагма и светофильтр(ы), необходимый для ослабления и спектральной фильтрации сигнала. Такой датчик во многом подобен звездному датчику. В статье рассматриваются следующие вопросы: 1. Оптическая схема формирования сигнала и определение его формы. 2. Энергетический расчет. 3. Алгоритмы обработки сигнала (вычисление координат). 4. Результаты математического моделирования работы алгоритма оценки координат изображения с использованием калмановской фильтрации. 1. Оптическая схема формирования сигнала и определение его формы Основными элементами оптической схемы являются (рис.1): светофильтр, диафрагма, фотоприемная матрица.
При рассмотрении процесса формирования сигнала необходимо оценить влияние дифракции. В данном случае имеется в виду дифракция плоских световых волн - дифракция Фраунгофера (этот вид дифракции обычно оценивается аналитически). Рассмотрим дифракцию от прямоугольного отверстия. Направление светового излучения, претерпевшего дифракцию, определяется с помощью двух углов - j и y - между осями X и Y, лежащими в плоскости диафрагмы, а распределение его интенсивности I - размерами отверстия (шириной X и высотой Y). Распределение интенсивностей в плоскости матрицы от одного отверстия имеет вид
где l - длина волны излучения. Примем j » y » 900, что справедливо для случаев, когда солнечное излучение направлено перпендикулярно матрице. Положим также Y = 0, I0 = 1, что в целом не меняет общности. Тогда для распределения по одной из осей получим
График этой зависимости приведен на рис.2. По оси X отложена величина X/l , по оси Y - величина I. Очевидно, что при X >> l представленный график стягивается в d -функцию. Это означает, что при размерах отверстия в диафрагме, превышающих ~ в 10 раз длину волны падающего излучения, дифракция практически не оказывает влияния на формирование изображения. Таким образом, с этой точки зрения целесообразно при работе датчика в видимом диапазоне с длиной волны порядка 0,4 мкм выбирать размер отверстий в диафрагме X(Y) > 4 мкм, что соизмеримо с размером чувствительного элемента матрицы. В таком случае при рассмотрении процесса формирования изображения достаточно ограничиться законами геометрической оптики. В связи с этим рассмотрим формирование изображения отверстием диафрагмы (рис. 3), где показано формирование сигнала при освещении Солнцем отверстия диафрагмы; a » 32¢ - видимый угловой размер солнечного диска; 2R - область, освещаемая Солнцем; d - расстояние от матрицы ПЗС до диафрагмы.
На основании данных рис. 3 можно легко показать, что соотношение между параметрами для представленной конфигурации определится простым выражением: R = 2(X/2 + d·tg(a /2)). Исходя из изложенного выше положим X = 10 мкм, R = 64 мкм (4 элемента матрицы при размерах элемента 16 ´ 16 мкм). Для этих условий получим d = (R - X)/[2tg(a /2)], что составит d » 6, 2мм. Здесь следует отметить, что возможна иная конфигурация хода лучей, соединяющих край диска Солнца, край отверстия и попадающих на второй и третий элементы. Альтернатива состоит в том, что эти лучи могут пересекаться. Конкретная конфигурация зависит от соотношения определяемых выше параметров датчика. Форма полезного сигнала, формируемого отверстием диафрагмы (по одной координате), представлена на рис. 4. Форма определена качественно.
Фрагмент матрицы на рис. 4 соответствует схеме формирования изображения на рис. 3. Для того чтобы определить количественные соотношения между отсчетами, необходимо смоделировать процесс формирования сигнала для двух координат. Обратимся теперь к энергетическому расчету датчика, так как он определяет размер отверстий диафрагмы в соответствии с величиной входного сигнала. 2. Энергетический расчет Расчет величины полезного сигнала начнем с задания рабочего диапазона длин волн (спектрального диапазона) l 1...l 2 датчика. Расчет будем производить по формуле
где : N - количество фотонов, попавшее на фотоприемник; h - постоянная Планка, равная 6, 62∙10-34 Дж× с; с - скорость света, м/с; l ср - средняя длина волны в диапазоне l 1:l 2 ; S - площадь отверстия в диафрагме, равная X´ Y; tk - время накопления (кадра), с; t - коэффициент пропускания фильтров; p(l ) - спектральная солнечная постоянная, Вт/(см2∙мкм). Нашей задачей является вычисление величины N, а затем количества электронов в элементе, генерируемых под воздействием фотонов. Зададимся диапазоном l 1...l 2 = 0,3...0,4мкм, что можно обеспечить двумя фильтрами - УФС-3 (ультрафиолетовое стекло) и СЗС (сине-зеленое стекло) для того, чтобы:
Зададимся следующими данными: l ср = 0,35мкм; S = 10 ´ 10 мкм; tk = 10-3 c; t = 0,1; p(l ) » 0,0085 Вт/см2 (в диапазоне 0,3...0,4мкм); Для этих условий N » 1,5∙106 фотонов. Теперь необходимо учесть, что это количество фотонов распределено примерно на 16 элементов (в соответствии с рис. 4) Для точного расчета нужно путем моделирования построить двумерное распределение освещенности по изображению. В первом приближении будем исходить из равномерного распределения. Тогда получим, что количество фотонов, попадающее в один элемент матрицы, N » 105 фотонов. Для вычисления количества электронов, накопленных под воздействием фотонов в одном элементе, следует учесть квантовую эффективность h £ 0,1 в этом диапазоне длин волн. Тогда получим N = 104 электронов. Потенциальная яма матрицы ПЗС с объемным каналом вмещает примерно 1,3∙105 электронов. Таким образом, при описанной выше конфигурации датчика мы имеем возможность работать в середине динамического диапазона матрицы. Заметим, что при более детальном расчете потребуется учитывать уменьшение величины сигнала при косом падении солнечных лучей на поверхность датчика. 3. Алгоритмы обработки сигнала (вычисление координат) Элементарная оценка точности измерения угловых координат с помощью оптико-электронного датчика (ОЭД) на ПЗС в простейшем случае, когда угловые координаты излучателя оцениваются по положению элемента ПЗС с максимальной амплитудой, показывает, что погрешность оценки координат составляет половину мгновенного углового поля ОЭД. Исходным требованием к точности, например, в системах наведения телескопов и автономной навигации является величина СКО погрешности определения угла не более 1...5¢ ¢ . Поэтому в подобных системах необходимо принимать меры для уменьшения погрешности. Данный путь применим и для солнечного датчика описанной выше конфигурации. Существуют два пути снижения этой погрешности - конструктивный и алгоритмический. Суть первого состоит в изменении параметров ОЭД, а второго - в разработке и использовании таких методов обработки изображения, которые позволяют получить требуемую точность. Рассмотрим возможности алгоритмического пути повышения точности. Можно показать, что потенциальная точность, определяемая СКО погрешности оценки координат изображения точечного источника, в ОЭД с ПЗС составляет величину 0,01 элемента разложения при использовании оптимального метода максимума правдоподобия. Если применять более простые субоптимальные методы, которые значительно проще реализовать, можно добиться снижения погрешности до 0,02...0,1 элемента разложения. Необходимым условием применения субоптимальных методов является дефокусировка изображения излучателя на несколько элементов матрицы (как правило, 3х3 или 4х4 элемента). При этом в некоторых случаях большая часть энергии пятна рассеяния (~70 %) попадает в 1 элемент матрицы. Перейдем к рассмотрению методов определения координат [1- 4]. Оценка параметров является одной из основных операций первичной обработки сигналов в измерительных ОЭД. Оценка параметров производится после того, как принято решение об обнаружении сигнала. При этом производится грубое определение координат точечного излучателя. Задача измерителя - уточнение оцениваемых параметров. В дальнейшем предполагается, что совокупность сигналов, по которым решается задача оценки параметров, расположена в окне, размеры которого определены на этапе обнаружения и соответствуют области, занимаемой полезным сигналом. Показателем качества оценок координат, как уже упоминалось, является погрешность оценки координат и трудоемкость реализации соответствующих алгоритмов. Оптимальные алгоритмы оценки координат изображений (и, соответственно, оценки угловых координат излучателя в пространстве предметов) по аналогии с измерениями, проводимыми в радиолокации, могут быть синтезированы по критерию максимума правдоподобия. Вид функции правдоподобия зависит от статистических характеристик сигналов, помех и формы сигнала. При известной форме сигнала, принимаемого ОЭД с матрицей ПЗС, на фоне аддитивного нормального стационарного белого шума можно сформировать логарифм функции правдоподобия и определить структурную схему измерения параметров сигнала. Однако построить непрерывную функцию правдоподобия и найти ее максимум (параметры сигнала) сложно, в связи с чем реализация такой процедуры обработки весьма проблематична. Для оценки координат изображений могут быть использованы следующие субоптимальные методы:
Рассмотрим кратко перечисленные методы. Методы 1 - 5 предполагают формирование одномерных линеек по осям x и y. Метод 6 предполагает работу с оригинальной подматрицей без ее преобразования в одномерные сигналы. Как показали исследования, оценкам по методу 3 свойственны систематические смещения, учитывать которые не всегда удобно, поэтому здесь этот метод не рассматривается. Методу 5 будет рассмотрен далее отдельно. Одномерные линейки из подматрицы формируются так, как это показано на рис. 5.
Тогда выражения для оценки координаты изображения где Q1 = Q11 + Q21 + Q31 + Q41 ; Q2 = Q12 + Q22 + Q32 + Q42 ; Q3 = Q13 + Q23 + Q33 + Q44 ; Q4 = Q14 + Q24 + Q34 + Q44 , которые формируются так, как это показано на рис. 5; Qij - величина сигнала в элементе, находящегося в i-той строке, j-том столбце подматрицы. На основе решения уравнения правдоподобия для оценки координат было получено выражение для оценки при аппроксимации распределения освещенности по изображению в виде гауссоиды (нормального распределения) вращения Распределение освещенности по изображению, и, соответственно, отсчётов по линейке, может быть аппроксимировано косинусной функцией. В нашем случае такое описание имеет вид где Q(x) - огибающая отсчетов полезного сигнала; Q0 - амплитуда полезного сигнала; x - текущая координата. В этом случае на основе метода максимума правдоподобия для Это же выражение может быть получено на основе метода наименьших квадратов. Распределение освещенности по изображению излучателя, как правило, имеет один максимум, поэтому его часто описывают гауссоидой вращения. Исходя из этих представлений, может быть получен алгоритм оценки параметров такой гауссоиды - положения максимума проводя вычисления параметров гауссоиды вращения и усредняя полученные выражения по строкам, получим выражения для оценок упомянутых выше параметров Проводя аналогичные вычисления по столбцам, получим Оценки по приведенным формулам будут получены в элементах разложения матрицы. При этом система координат подматрицы привязана к центру элемента с максимальной амплитудой Q33. Перспективным для оценки координат точечных источников излучения, изображения которых имеют форму кольца или равномерно освещенного круга, является подход, базирующийся на построении кривой второго порядка методом наименьших квадратов по точкам, определяющим край изображения. После чего определяются координаты центра фигуры, образованной этой кривой. Такой фигурой является, как правило, окружность или эллипс. Край изображения в ОЭД имеет некоторое размытие. Приведем здесь лишь конечный результат процедуры расчета где а - большая полуось эллипса, аппроксимирующего изображение b - малая полуось эллипса, аппроксимирующего изображение; N - число точек для построения кривой второго порядка, полученное после низкочастотной фильтрации; x0j, y0j - координаты энергетических центров в окнах 2 ´ 2 элемен- та, полученные при низкочастотной фильтрации. При четном N тогда, например, для восьми точек (типичный случай) получим Радикальным алгоритмическим методом повышения точности оценки координат изображения является метод 7, использующий фильтр Калмана (итерационный метод оценки параметров изображений излучателей). Этот метод предполагает применение в качестве априорной информации некоторого опорного сигнала, например гауссоиды вращения, либо сигнала, полученного при калибровке ОЭД, относительно которого определяется рассогласование с получаемой реализацией зашумленного сигнала. Оценка этого рассогласования производится с использованием классического фильтра Калмана. Достоинством данного метода является то, что он свободен от систематических погрешностей, свойственных субоптимальным методам, описанным выше, в той мере, с какой опорный сигнал соответствует истинному сигналу в данной реализации. Если такое расхождение существует, то оценка становится смещенной, что приводит к дополнительной погрешности. Поэтому в данном методе ключевым моментом становится нахождение опорного сигнала для использования главного достоинства итерационного метода. Задача оценки координат изображения точечного источника с применением фильтра Калмана может быть сформулирована следующим образом. Будем полагать, что в данной оптико-электронной системе точно известна характеристика тракта первичной обработки, преобразованная матричным фотоприемником и последующими устройствами обработки в дискретную последовательность сигналов, которая в виде оцифрованной подматрицы хранится в памяти ЭВМ. Можно показать, как получить оценку такой характеристики. Размер подматрицы может составлять 4 х 4 элемента. По полученной картине распределения зарядов и известной характеристике (назовем ее опорной функцией), точно привязанной к центру координат подматрицы (и, соответственно, всей матрицы), требуется уточнить координаты полученного изображения относительно центра подматрицы. Точнее говоря, требуется определить рассогласование между опорной функцией и полученным распределением картины зарядов по изображению. Поскольку точек, где требуется оценить рассогласования, несколько (в одномерном случае четыре, в двумерном - шестнадцать) и, соответственно, столько же значений (или реализаций) рассогласования, то они могут быть обработаны с привлечением статистических методов с целью уменьшения случайных погрешностей по одному кадру (или по одной реализации сигнала). Наиболее удобным, с точки зрения экономии памяти встроенной ЭВМ, для этой цели является фильтр Калмана. Рассмотрим более подробно решение поставленной задачи.
На рис. 6а приведена опорная функция, а на рис.6б - реализация полезного сигнала без шумов. Для демонстрации возможностей метода и оценки его точности и сходимости обе картины были сформированы путем моделирования. В качестве базовой модели была принята двумерная симметричная функция Гаусса вида При моделировании опорной функции предполагалось, что положение максимума функции Гаусса совпадает с центром подматрицы 4х4 элемента, а при моделировании реализации изображения максимум функции Гаусса был смещен на 0,5 элемента по обеим осям, т.е. Следующим этапом обработки является формирование линеек по осям x и y, каждая из которых содержит 4 элемента. Ранее при изложении методики оценки координат с помощью интерполяционных алгоритмов упоминалось о возможности формирования таких линеек. Элементы линеек определяются следующим образом: где i - номер строки; j - номер столбца; Qi j - величина сигнала в элементе i - той строки j - того столбца подматрицы (или матрицы). Таким образом, каждый элемент линейки, например, по оси x, представляет собой сумму элементов столбца подматрицы, соответствующего данному элементу. Например, первый элемент по оси x есть сумма элементов первого столбца подматрицы. Аналогично формируется и линейка по y, только суммирование производится уже не по столбцам, а, соответственно, по строкам. В дальнейшем будем рассматривать все операции применительно к оси x. Операция по оси y аналогичны. Теперь необходимо определить рассогласование между опорной функцией и сформированной из изображения линейкой по оси x. Для этого может быть использовано аналитическое описание распределения отсчетов по линейке в виде усеченного ряда Фурье:
где Такое описание дает возможность осуществить нормировку опорной функции и сформированной линейки, а также определить искомые рассогласования в точках Рассмотрим операцию нормировки. Для этого необходимо найти положение и величину максимума Q(x). Ранее было показано, что положение максимума можно определить как тогда где Qm - вычисленное максимальное значение реализации сигнала. Нормированные значения
где Далее, уже по вновь сформированным линейкам
Из рис.7 следует, что рассогласования где Рассогласования и будут иметь значение в соответствующих точках
В соответствии с приведенными выше формулами были сформированы рассогласования
Таблица 1
Определение
Здесь D 2 - дисперсия систематической (или методической) погрешности определения d x, в нашем случае не превышает (0,05 D x)2 , так как начальное приближение может быть определено с погрешностью менее 0,2 элемента с помощью любого алгоритма вычисления координат, приведенного выше. P* - в общем случае матрица дисперсий, а в нашем случае - дисперсия случайной погрешности измерения величины d x. Она в реальном приборе определяется как внешними помехами, так и внутренними шумами. Поскольку мы рассматриваем систему без помех, то случайная погрешность определяется лишь погрешностью вычисления и округления значений сигнала, представленных на рис.8.
P* представляет собой номированную величину и определяется как где s ф является СКО погрешности, обусловленной помехами. Отметим, что P* примерно на 2 порядка меньше D 2. Этого достаточно для вычисления первого значения B - коэффициента усиления фильтра. Особенность процедуры фильтрации заключается в том, что обработке подвергаются всего 4 значения d
x1...d
x4 в несколько итераций до сходимости с требуемой точностью. То есть, в процессе первой итерации обрабатываются рассогласования, полученные по изложенной выше методике. В процессе второй итерации обрабатываются их оценки и т. д. до тех пор, пока не будет достигнута требуемая точность, либо не выполнено заданное число итераций. В соответствии с описанной процедурой фильтрации были обработаны данные, представленные в табл.1. Результаты этой обработки сведены в табл.2. Они представлены в графе под номером 1, откуда следует, что оцениваемое значение
Таблица 2
Разработаны также модификации итерационного метода, позволяющие приблизиться к потенциальной точности определения координат изображения. Выводы.
Литература
Автор(ы) : В.С. Пашков
Внимание ! Использование любых текстовых или графических материалов(а так-же их фрагментов) с сайта http://www.telephototech.ru возможно с разрешения администрации сайта с обязательным указанием ссылок на первоисточник и авторов статей и публикаций ! |
| ||||||||
 Содержание
Содержание
 Разделы журнала
Разделы журнала

 ,
, .
.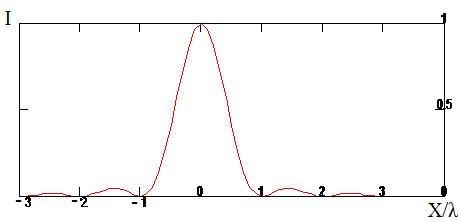 Рис.2. Зависимость интенсивности излучения от длины волны
Рис.2. Зависимость интенсивности излучения от длины волны
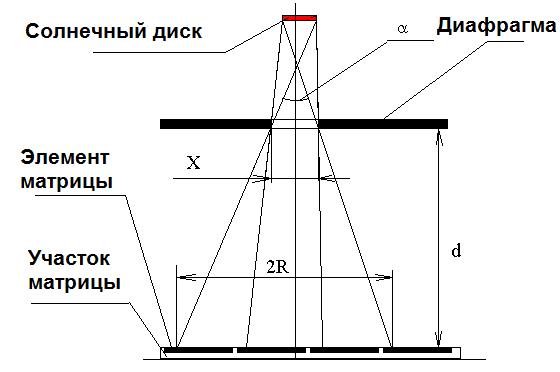 Рис.3. Формирование изображения отверстием диафрагмы
Рис.3. Формирование изображения отверстием диафрагмы
 Рис.4. Распределение зарядовых пакетов полезного сигнала, формируемого отверстием диафрагмы (по одной координате): Q1 - Q4 - отсчеты сигнала в чувствительных элементах 1:4.
Рис.4. Распределение зарядовых пакетов полезного сигнала, формируемого отверстием диафрагмы (по одной координате): Q1 - Q4 - отсчеты сигнала в чувствительных элементах 1:4.
 ,
, , ( 1 )
, ( 1 ) . ( 2)
. ( 2) ,
,  ( 3)
( 3) ,
, , (4)
, (4) . (5)
. (5) , (6)
, (6)  , (7)
, (7)  ,
,  , (8)
, (8) 
 ,
, ;
;  . (9)
. (9) 
 ,
,
 ,
,
 ,
,
 , (10)
, (10)
 (11)
(11) Рис.8. Значения рассогласований
Рис.8. Значения рассогласований

{kind=link}